Der ABB GoFa CRB 15000 ist ein kollaborativer Roboter (Cobot), der für die sichere Zusammenarbeit mit menschlichen Arbeitern ohne physische Barrieren konzipiert ist. Mit seinem schlanken Design und den fortschrittlichen Sicherheitsfunktionen maximiert GoFa die Flexibilität und Effizienz in verschiedenen Anwendungen, von der Montage und Maschinenbedienung bis hin zum Palettieren und Schrauben.
Stark und dennoch sicher: GoFa kann Nutzlasten von bis zu 12 kg bewältigen und verfügt in jedem seiner sechs Gelenke über Drehmomentsensoren, die für überlegene Leistung und Kraftbegrenzung sorgen. Dadurch wird sichergestellt, dass GoFa bei Kontakt mit einem Menschen sofort anhalten kann, was das Verletzungsrisiko verringert. Das Design des Roboters weist eine abgerundete Geometrie ohne Quetschstellen auf, was die Sicherheit weiter erhöht.
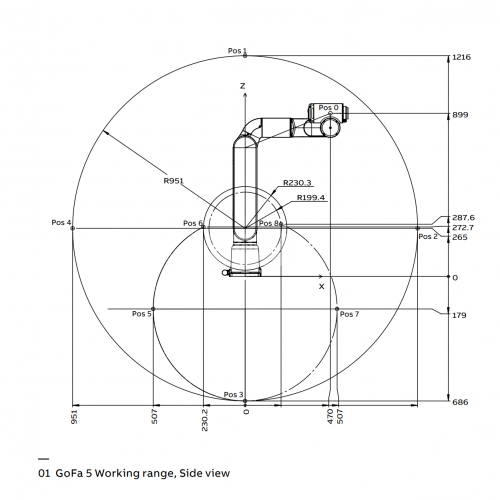
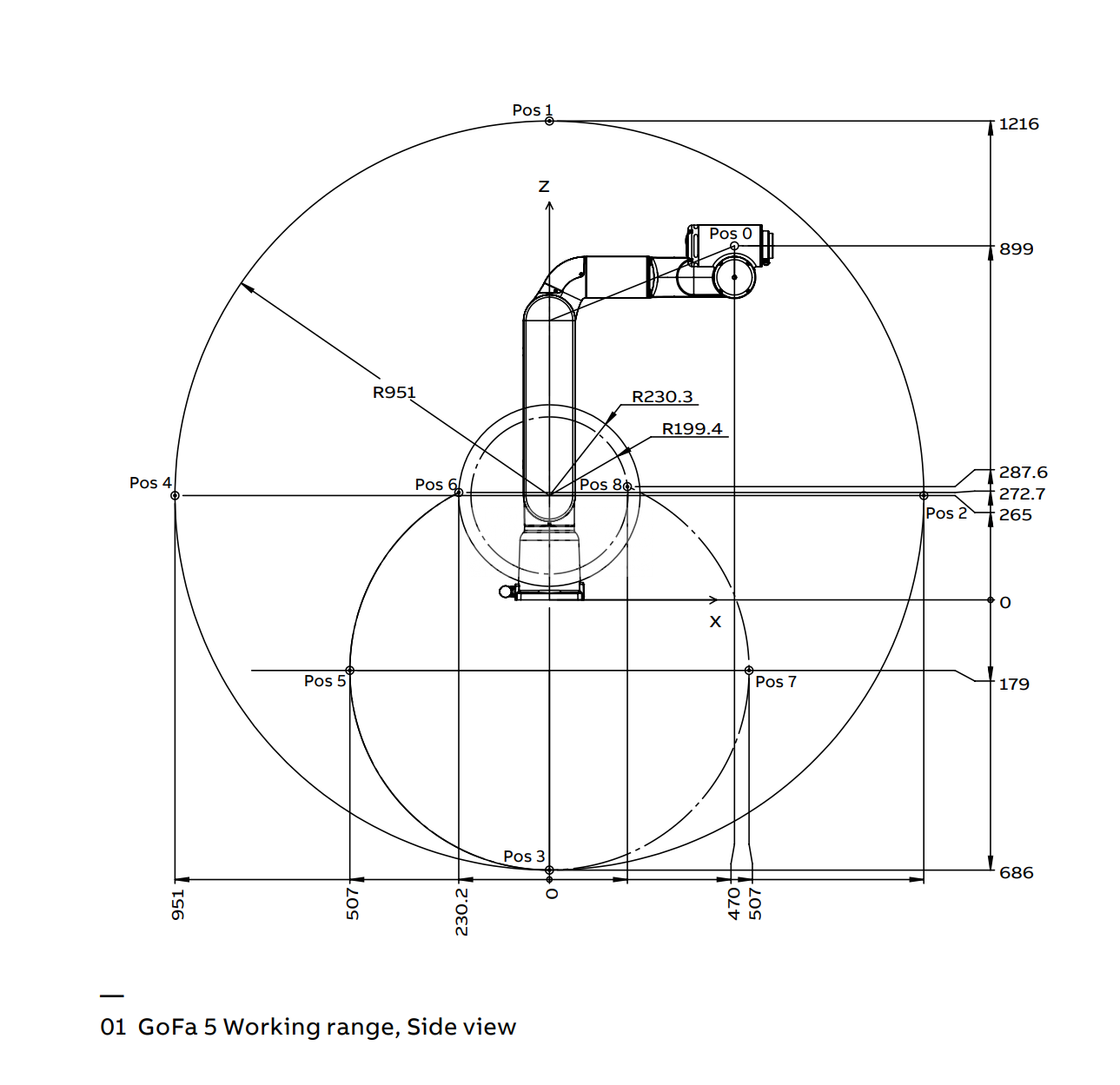
Schnellere Leistung für höhere Produktivität: GoFa verfügt über eine maximale Tool Center Point (TCP)-Geschwindigkeit von bis zu 2,2 m/s und ist damit schneller als viele andere Cobots seiner Klasse. Diese Geschwindigkeit, kombiniert mit einer Reichweite von bis zu 1,62 Metern und einer Wiederholgenauigkeit von 0,02 mm, ermöglicht es GoFa, mehr Vorgänge innerhalb eines festgelegten Zeitraums auszuführen und so die Produktivität und Effizienz bei verschiedenen Aufgaben zu steigern.
Einfache Einrichtung und Bedienung: Der GoFa CRB 15000 ist auf Benutzerfreundlichkeit ausgelegt und bietet Funktionen wie Lead-Through-Programmierung, eine intuitive FlexPendant-Schnittstelle und ABBs Wizard Easy Programming. Dank dieser Funktionen können selbst Erstbenutzer den Roboter schnell und effizient einrichten und bedienen, wodurch Ausfallzeiten minimiert und die Benutzerfreundlichkeit maximiert wird.
GoFa wird vom OmniCore-Controller von ABB angetrieben, der für seine hohe Leistung, Flexibilität und einfache Integration in moderne Produktionstechnologien bekannt ist. Diese Kombination aus fortschrittlichen Funktionen und benutzerzentriertem Design macht den ABB GoFa CRB 15000 zu einer vielseitigen und effizienten Lösung für kollaborative Robotikanforderungen in unterschiedlichsten Industrieumgebungen.
| Reichweite (mm) | 950 (Handgelenk) 1050 (Flansch) |
| Nutzlast (kg) | 5 |
| Armbelastung | 1 (auf Achse 4 montiert) |
| Anzahl der Achsen | 6 |
| Schutz | IP54 |
| Montage | Winkel, Wand, Boden und Decke |
| Regler | OmniCore C30 |
| Stromversorgung | 24V/2A Versorgung |
| Kundensignale | 4 Signale (für IO, Feldbus oder Ethernet) |
| Werkzeugflansch | Norm ISO 9409-1-50 |
| Funktionssicherheit | SafeMove Collaborative (zertifiziert nach Kategorie 3), PL d |
| Maximale TCP-Geschwindigkeit | 2,2 m/s |
| Maximale TCP-Beschleunigung (kontrollierte Bewegung bei Nennlast) |
36,9 m/s2 |
| Maximale TCP-Beschleunigung (Not-Aus für Nennlast) |
61,6 m/s2 |
| Wiederholbarkeit | 0,02 mm |
| Gewicht | 28 kg |
Achsenbewegung |
Arbeitsbereich |
Max. Achsengeschwindigkeit |
| Drehung Achse 1 | -180º bis +180º | 125º/s |
| Achse 2 Arm | -180º bis +180º | 125º/s |
| Achse 3 Arm | -225º bis +85º | 140º/s |
| Achse 4 Handgelenk | -180º bis +180º | 200º/s |
| Achse 5 Biegung | -180º bis +180º | 200º/s |
| Achse 6 drehen | -270º bis +270º | 200º/s |
Anwendungen
Be- und Entladen von Teilen , Bearbeitung , Handhabung von Teilen , Messung , Montage von Teilen , Kleben - Kleben , 3C Electronics , Advanced Manufacturing , Education

{kind=link}
{kind=link}